39 | 存储与缓存
你好,我是七牛云许式伟。
前面接连三讲我们介绍了存储中间件的由来,以及最为常见的存储中间件,如:键值存储(KV Storage)、数据库(Database)、对象存储(Object Storage)。
当然,它们并不是全部。常见的存储中间件还有很多,比如消息队列(MQ)、搜索引擎(Search Engine)等等。
限于篇幅,我们不能一一对它们进行分析。今天,我们聊一聊缓存(Cache)。
memcached
缓存(Cache)是什么?
简单说,缓存是存储(Storage)的加速器。加速的原理通常是这样几种方法:
最常见的是用更高速的硬件来加速。比如,用 SSD 缓存加速 SATA 存储,用内存缓存加速基于外存的存储。
还有一种常见的方法是用更短的路径。比如,假设某个计算 y = F(x) 非常复杂,中间涉及很多步骤,发生了一系列的存储访问请求,但是这个计算经常会被用到,那么我们就可以用一个 x => y 的内存缓存来加速。
可见,缓存的数据结构从实现上来讲只需要是一个键值存储。所以它的接口可以非常简单:
type Cache {...}func (cache *Cache) Get(key []byte) (val []byte, err error)func (cache *Cache) Set(key, val []byte) (err error)func (cache *Cache) Delete(key []byte) (err error)
第一个被广泛应用的内存缓存是 memcached。通常,我们会使用多个 memcached 实例构成一个集群,通过 Hash 分片或者 Range 分片将缓存数据分布到这些实例上。
一个典型的 memcached 的使用方式如下:
func FastF(x TypeX) (y TypeY) {key := toBytes(x)hash := hashOf(key)i := hash % countOf(memcaches)val, err := memcaches[i].Get(key)if err != nil {y = F(x)val = toBytes(y)memcaches[i].Set(key, val)} else {y = fromBytes(val)}return}
类似的缓存逻辑大家应该比较经常见到。
这个示例我们采用的是简单 Hash 分片的方法,它的好处是非常容易理解。当然不太好的地方在于,一旦我们要对 memcached 集群扩容,countOf(memcaches) 就会变化,导致大量的 key 原先落在某个分片,现在就落到一个新的分片。
这会导致大量的缓存未命中(Cache Miss),也就是 cache.Get(key) 返回失败。在缓存未命中的情况下,FastF(x) 不只是没有加速 F(x),还增加了两次网络请求:cache.Get 和 cache.Set。
所以缓存系统的一个核心指标是缓存命中率(Cache Hit Rate),即在一段时间内,FastF 缓存命中的次数 / 所有 FastF 的调用次数。
为了避免 memcached 集群扩容导致缓存命中率大幅降低,一般我们不会用简单哈希分片,而是用一致性哈希。
什么情况下需要扩容?一旦缓存命中率趋势下降,且下降到某个阈值,就要考虑给缓存集群扩容。
缓存 vs 存储
通过以上的介绍可以看出,缓存的基础逻辑是非常简单的。问题是:
缓存(Cache)和存储(Storage)是什么关系?它也是一种存储中间件么?
既是也不是。
首先,缓存和一般的存储中间件一样,也在维持着业务状态。从这个角度看,缓存的确是一类存储。
但是,缓存允许数据发生丢失,所以缓存通常是单副本的。一个内存缓存的集群挂了一个实例,或者一个外存缓存的集群坏了一块硬盘,单就缓存集群本身而言,就出现数据丢失。
缓存数据丢失,这事可大可小。只要不是发生大片大片的缓存数据丢失的情形,通常只是会造成后端存储(Storage)的短时压力变大。
但在极端的情况下,可能会出现雪崩的情况。
雪崩怎么形成?首先是部分缓存实例宕机,导致缓存命中率(Cache Hit Rate)下降,大量的请求落到后端存储上,导致后端存储过载,也出现宕机。
这时就会出现连锁反应,形成雪崩现象。后端存储就算重新启动起来,又会继续被巨大的用户请求压垮,整个系统怎么启动也启动不了。
应该怎么应对雪崩?最简单的办法,是后端存储自己要有过载保护能力。一旦并发的请求超过预期,就要丢弃部分请求,以减少压力。
我们在本章开篇第一讲 “34 | 服务端开发的宏观视角” 中,总结服务端开发的体系架构如下:
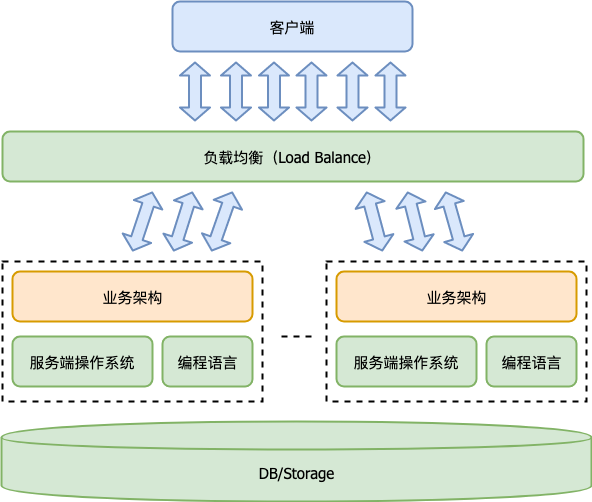
在这个图中,我们并没有把缓存(Cache)画出来。但结合上面介绍的缓存典型使用方式,我们很容易脑补它在图中处于什么样的位置。
回到前面的问题,缓存(Cache)和存储(Storage)到底是什么关系?
我个人认为,缓存其实应该被认为是存储的补丁,而且是理论上来说不太完美的补丁。
为什么说它是补丁?
因为如果存储本身非常匹配业务场景的话,它不应该需要缓存在它前面挡一道,内部自己就有缓存。至于把一个复杂的 F(x) 缓存起来,更根本的原因还是存储和业务场景不那么直接匹配所致。
但是实现一个存储很难,所以存储的业务场景匹配性很难做到处处都很好。
出现事务(Transaction),是为了改善存储的业务场景“写操作”的匹配性,把一个复杂操作包装成一个原子操作。
出现缓存(Cache),则是为了改善存储的业务场景“读操作”的匹配性,提升高频读操作的效率。
所以我们说,缓存是一个存储的补丁。
那么为什么我们说这是一个不太完美的补丁呢?
因为上面的 FastF(x) 并没有被包装成一个原子的读操作。从严谨的角度来说,这段代码逻辑是有问题的,它会破坏数据的一致性。
对于一个确定的 x 值,如果 F(x) 永远不变,这就没问题。但如果 F(x) 值会发生变化,会有多个版本的值,那就有可能会出现并发的两个 F(x) 请求得到的结果不同,从而导致缓存中的值和存储中的值不一致。
这种情况后果有可能会比较严重。尤其是如果我们有一些业务逻辑是基于 FastF(x) 得到的值,就有可能会出现逻辑错乱。
groupcache
为了避免发生这类一致性问题,memcached 的作者 Brad Fitzpatrick(bradfitz)搞了一个新的内存缓存系统,叫 groupcache。
groupcache 基于 Go 语言实现,其 Github 主页为:
从业务角度,groupcache 主要做了两大变化:
其一,引入 group 的概念。这是一个重要改动,也是 groupcache 这个名字的来由。
在同一个缓存集群,可能会需要缓存多个复杂操作,比如 F(x)、G(x)。如果没有 group,那么我们就不能只是记录 x => y 这样的键值对,而是要记录 F#x => y,G#x => y 这样的键值对。中间的 # 只是一个分隔符,换其他的也可以。
看起来好像也还可以?
其实不然,因为 F(x)、G(x) 在同一个内存缓存集群就意味着它们相互之间会淘汰对方,这里面的淘汰规则不是我们能够控制的,很难保证结果符合我们的预期。
那么有 group 会变成什么样?首先你可以创建 F、G 两个独立的 group,每个 group 可以设定独立的内存占用上限(cacheBytes)。
这样,每个 group 就只淘汰自己这个 group 内的数据,相当于有多个逻辑上独立的内存缓存集群。
另外,在 group 中只需要记录 x => y 这样的键值对,不再需要用 F#x、G#x 这种手工连接字符串的方式来模拟出名字空间。
其二,值不可修改。一旦某个 x 值 Get 到的值为 y,那么就一直为 y。它的使用方式大体如下:
var groupF = groupcache.NewGroup("F", cacheBytes, groupcache.GetterFunc(func(ctx groupcache.Context, key string, dest groupcache.Sink) error {x := fromString(key)y := F(x)return dest.SetBytes(toBytes(y))}))func FastF(x TypeX) (y TypeY) {key := toString(x)var val []bytegroupF.Get(ctx, key, groupcache.AllocatingByteSliceSink(&val))y = fromBytes(val)return}
这当然也就意味着它也不需要引入 memcached 中的缓存失效时间这样的概念。因为值是不会过时的,它只会因为内存不足而被淘汰。
一致性问题也被解决了。既然值不可修改,那么自然就不存在一致性问题。
当然,groupcache 是一个理论完美的内存缓存系统,它解决了 memcached存在的一致性缺陷。但是 groupcache 对使用者来说是有挑战的,某种意义上来说,它鼓励我们用函数式编程的方式来实现业务逻辑。
但是你也知道,函数式编程是比较小众的。所以怎么用好 groupcache,挑战并不低。
Redis
谈到存储与缓存的关系,不能不提 Redis。
Redis 在定位上特别奇怪,以至于不同的人对它的认知并不相同。有的人会认为它是内存缓存,有的人会认为它是存储。
Redis 的确可以当作缓存来用,我们可以设置内存上限,当内存使用达到上限后,Redis 就会执行缓存淘汰算法。只不过,如果我们把它当作内存缓存,那么其实它只需要是一个简单的键值存储(KV Storage)就行。
但是 Redis 实际上是 key => document,它的值可以是各类数据结构,比如:字符串,哈希表,列表,集合,有序集合(支持 Range 查询),等等。
不仅如此,Redis 还支持执行 Lua 脚本来做存储过程。
这些都让 Redis 看起来更像一个数据库类的存储中间件。
但当我们把 Redis 看作存储,我们有这样一些重要的问题需要考虑。这些问题非常非常重要,存储系统可不是闹着玩的。
问题一,是持久性(Durability)。Redis 毕竟是基于内存的存储,虽然它也支持定期写到外存中,但是定期持久化的策略对于一个服务端的存储系统来说是不合格的。因为如果发生宕机,上一次持久化之后的新数据就丢了。
所以 Redis 需要其他的提升持久性的方案,比如多副本。
Redis 的确支持多副本。但是只是同机房多台机器的多副本是没有用的,因为它没有办法防止机房整体断电这类的故障。当出现机房级的故障时,就有极大概率会丢失数据。
对于存储系统来说,这是不可接受的。因为相比人们对持久性的要求,机房整体断电并不是一个太小概率的事件。
所以 Redis 如果要作为存储的话,必须保证用多机房多副本的方式,才能保证在持久性这一点上能够达标。
但是多机房多副本这样的方式,显然实施条件过于苛刻。会有多少企业仅仅是为了部署 Redis 去搞多个机房呢?
问题二,是重试的友好性。在 “29 | 实战(四):怎么设计一个“画图”程序?” 中我们提到过,考虑网络的不稳定性,我们设计网络协议的时候需要考虑重试的友好性。
在 Redis 的协议中,有不少请求用户很友好,但是对重试并不友好。比如,LPUSH 请求用来给列表(List)增加一个元素。但是在重试时一个不小心,我们很可能就往列表中添加了多个相同的元素进去。
总结来说,Redis 如果我们把它作为存储的话,坑还是不少的。它和 memcached 都是实用型的瑞士军刀,很有用,但是我们站在分布式系统的理论角度看时,它们都有那么一点不完美的地方。
结语
今天我们讨论了存储与缓存之间的关系,也分别介绍了三个模型迥异的缓存系统:memcached、groupcache、Redis。
缓存是一个存储系统在服务器性能上的补丁。这个补丁并不是那么完美。
如果你对今天的内容有什么思考与解读,欢迎给我留言,我们一起讨论。我们服务端开发相关的基础软件介绍得差不多了,下一讲我们将聊聊服务端开发的架构建议。
如果你觉得有所收获,也欢迎把文章分享给你的朋友。感谢你的收听,我们下期再见。