37 | 信号(上):项目组A完成了,如何及时通知项目组B?
上一节最后,我们讲了信号的机制。在某些紧急情况下,我们需要给进程发送一个信号,紧急处理一些事情。
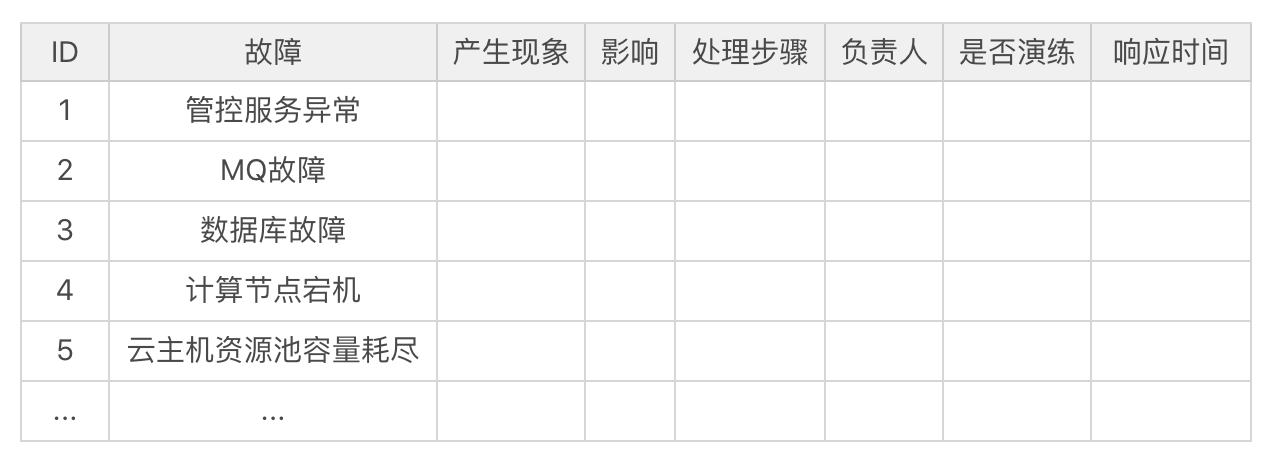
这种方式有点儿像咱们运维一个线上系统,为了应对一些突发事件,往往需要制定应急预案。就像下面的列表中一样。一旦发生了突发事件,马上能够找到负责人,根据处理步骤进行紧急响应,并且在限定的事件内搞定。
我们现在就按照应急预案的设计思路,来看一看Linux信号系统的机制。
首先,第一件要做的事情就是,整个团队要想一下,线上到底能够产生哪些异常情况,越全越好。于是,我们就有了上面这个很长很长的列表。
在Linux操作系统中,为了响应各种各样的事件,也是定义了非常多的信号。我们可以通过kill -l命令,查看所有的信号。
# kill -l1) SIGHUP 2) SIGINT 3) SIGQUIT 4) SIGILL 5) SIGTRAP6) SIGABRT 7) SIGBUS 8) SIGFPE 9) SIGKILL 10) SIGUSR111) SIGSEGV 12) SIGUSR2 13) SIGPIPE 14) SIGALRM 15) SIGTERM16) SIGSTKFLT 17) SIGCHLD 18) SIGCONT 19) SIGSTOP 20) SIGTSTP21) SIGTTIN 22) SIGTTOU 23) SIGURG 24) SIGXCPU 25) SIGXFSZ26) SIGVTALRM 27) SIGPROF 28) SIGWINCH 29) SIGIO 30) SIGPWR31) SIGSYS 34) SIGRTMIN 35) SIGRTMIN+1 36) SIGRTMIN+2 37) SIGRTMIN+338) SIGRTMIN+4 39) SIGRTMIN+5 40) SIGRTMIN+6 41) SIGRTMIN+7 42) SIGRTMIN+843) SIGRTMIN+9 44) SIGRTMIN+10 45) SIGRTMIN+11 46) SIGRTMIN+12 47) SIGRTMIN+1348) SIGRTMIN+14 49) SIGRTMIN+15 50) SIGRTMAX-14 51) SIGRTMAX-13 52) SIGRTMAX-1253) SIGRTMAX-11 54) SIGRTMAX-10 55) SIGRTMAX-9 56) SIGRTMAX-8 57) SIGRTMAX-758) SIGRTMAX-6 59) SIGRTMAX-5 60) SIGRTMAX-4 61) SIGRTMAX-3 62) SIGRTMAX-263) SIGRTMAX-1 64) SIGRTMAX
这些信号都是什么作用呢?我们可以通过man 7 signal命令查看,里面会有一个列表。
Signal Value Action Comment──────────────────────────────────────────────────────────────────────SIGHUP 1 Term Hangup detected on controlling terminalor death of controlling processSIGINT 2 Term Interrupt from keyboardSIGQUIT 3 Core Quit from keyboardSIGILL 4 Core Illegal InstructionSIGABRT 6 Core Abort signal from abort(3)SIGFPE 8 Core Floating point exceptionSIGKILL 9 Term Kill signalSIGSEGV 11 Core Invalid memory referenceSIGPIPE 13 Term Broken pipe: write to pipe with noreadersSIGALRM 14 Term Timer signal from alarm(2)SIGTERM 15 Term Termination signalSIGUSR1 30,10,16 Term User-defined signal 1SIGUSR2 31,12,17 Term User-defined signal 2……
就像应急预案里面给出的一样,每个信号都有一个唯一的ID,还有遇到这个信号的时候的默认操作。
一旦有信号产生,我们就有下面这几种,用户进程对信号的处理方式。
1.执行默认操作。Linux对每种信号都规定了默认操作,例如,上面列表中的Term,就是终止进程的意思。Core的意思是Core Dump,也即终止进程后,通过Core Dump将当前进程的运行状态保存在文件里面,方便程序员事后进行分析问题在哪里。
2.捕捉信号。我们可以为信号定义一个信号处理函数。当信号发生时,我们就执行相应的信号处理函数。
3.忽略信号。当我们不希望处理某些信号的时候,就可以忽略该信号,不做任何处理。有两个信号是应用进程无法捕捉和忽略的,即SIGKILL和SEGSTOP,它们用于在任何时候中断或结束某一进程。
接下来,我们来看一下信号处理最常见的流程。这个过程主要是分成两步,第一步是注册信号处理函数。第二步是发送信号。这一节我们主要看第一步。
如果我们不想让某个信号执行默认操作,一种方法就是对特定的信号注册相应的信号处理函数,设置信号处理方式的是signal函数。
typedef void (*sighandler_t)(int);sighandler_t signal(int signum, sighandler_t handler);
这其实就是定义一个方法,并且将这个方法和某个信号关联起来。当这个进程遇到这个信号的时候,就执行这个方法。
如果我们在Linux下面执行man signal的话,会发现Linux不建议我们直接用这个方法,而是改用sigaction。定义如下:
int sigaction(int signum, const struct sigaction *act,struct sigaction *oldact);
这两者的区别在哪里呢?其实它还是将信号和一个动作进行关联,只不过这个动作由一个结构struct sigaction表示了。
struct sigaction {__sighandler_t sa_handler;unsigned long sa_flags;__sigrestore_t sa_restorer;sigset_t sa_mask; /* mask last for extensibility */};
和signal类似的是,这里面还是有__sighandler_t。但是,其他成员变量可以让你更加细致地控制信号处理的行为。而signal函数没有给你机会设置这些。这里需要注意的是,signal不是系统调用,而是glibc封装的一个函数。这样就像man signal里面写的一样,不同的实现方式,设置的参数会不同,会导致行为的不同。
例如,我们在glibc里面会看到了这样一个实现:
# define signal __sysv_signal__sighandler_t__sysv_signal (int sig, __sighandler_t handler){struct sigaction act, oact;......act.sa_handler = handler;__sigemptyset (&act.sa_mask);act.sa_flags = SA_ONESHOT | SA_NOMASK | SA_INTERRUPT;act.sa_flags &= ~SA_RESTART;if (__sigaction (sig, &act, &oact) < 0)return SIG_ERR;return oact.sa_handler;}weak_alias (__sysv_signal, sysv_signal)
在这里面,sa_flags进行了默认的设置。SA_ONESHOT是什么意思呢?意思就是,这里设置的信号处理函数,仅仅起作用一次。用完了一次后,就设置回默认行为。这其实并不是我们想看到的。毕竟我们一旦安装了一个信号处理函数,肯定希望它一直起作用,直到我显式地关闭它。
另外一个设置就是SA_NOMASK。我们通过__sigemptyset,将sa_mask设置为空。这样的设置表示在这个信号处理函数执行过程中,如果再有其他信号,哪怕相同的信号到来的时候,这个信号处理函数会被中断。如果一个信号处理函数真的被其他信号中断,其实问题也不大,因为当处理完了其他的信号处理函数后,还会回来接着处理这个信号处理函数的,但是对于相同的信号就有点尴尬了,这就需要这个信号处理函数写得比较有技巧了。
例如,对于这个信号的处理过程中,要操作某个数据结构,因为是相同的信号,很可能操作的是同一个实例,这样的话,同步、死锁这些都要想好。其实一般的思路应该是,当某一个信号的信号处理函数运行的时候,我们暂时屏蔽这个信号。后面我们还会仔细分析屏蔽这个动作,屏蔽并不意味着信号一定丢失,而是暂存,这样能够做到信号处理函数对于相同的信号,处理完一个再处理下一个,这样信号处理函数的逻辑要简单得多。
还有一个设置就是设置了SA_INTERRUPT,清除了SA_RESTART。这是什么意思呢?我们知道,信号的到来时间是不可预期的,有可能程序正在调用某个漫长的系统调用的时候(你可以在一台Linux机器上运行man 7 signal命令,在这里找Interruption of system calls and library functions by signal handlers的部分,里面说得非常详细),这个时候一个信号来了,会中断这个系统调用,去执行信号处理函数,那执行完了以后呢?系统调用怎么办呢?
这时候有两种处理方法,一种就是SA_INTERRUPT,也即系统调用被中断了,就不再重试这个系统调用了,而是直接返回一个-EINTR常量,告诉调用方,这个系统调用被信号中断了,但是怎么处理你看着办。如果是这样的话,调用方可以根据自己的逻辑,重新调用或者直接返回,这会使得我们的代码非常复杂,在所有系统调用的返回值判断里面,都要特殊判断一下这个值。
另外一种处理方法是SA_RESTART。这个时候系统调用会被自动重新启动,不需要调用方自己写代码。当然也可能存在问题,例如从终端读入一个字符,这个时候用户在终端输入一个'a'字符,在处理'a'字符的时候被信号中断了,等信号处理完毕,再次读入一个字符的时候,如果用户不再输入,就停在那里了,需要用户再次输入同一个字符。
因此,建议你使用sigaction函数,根据自己的需要定制参数。
接下来,我们来看sigaction具体做了些什么。
还记得在学习系统调用那一节的时候,我们知道,glibc里面有个文件syscalls.list。这里面定义了库函数调用哪些系统调用,在这里我们找到了sigaction。
sigaction - sigaction i:ipp __sigaction sigaction
接下来,在glibc中,__sigaction会调用__libc_sigaction,并最终调用的系统调用是rt_sigaction。
int__sigaction (int sig, const struct sigaction *act, struct sigaction *oact){......return __libc_sigaction (sig, act, oact);}int__libc_sigaction (int sig, const struct sigaction *act, struct sigaction *oact){int result;struct kernel_sigaction kact, koact;if (act){kact.k_sa_handler = act->sa_handler;memcpy (&kact.sa_mask, &act->sa_mask, sizeof (sigset_t));kact.sa_flags = act->sa_flags | SA_RESTORER;kact.sa_restorer = &restore_rt;}result = INLINE_SYSCALL (rt_sigaction, 4,sig, act ? &kact : NULL,oact ? &koact : NULL, _NSIG / 8);if (oact && result >= 0){oact->sa_handler = koact.k_sa_handler;memcpy (&oact->sa_mask, &koact.sa_mask, sizeof (sigset_t));oact->sa_flags = koact.sa_flags;oact->sa_restorer = koact.sa_restorer;}return result;}
这也是很多人看信号处理的内核实现的时候,比较困惑的地方。例如,内核代码注释里面会说,系统调用signal是为了兼容过去,系统调用sigaction也是为了兼容过去,连参数都变成了struct compat_old_sigaction,所以说,我们的库函数虽然调用的是sigaction,到了系统调用层,调用的可不是系统调用sigaction,而是系统调用rt_sigaction。
SYSCALL_DEFINE4(rt_sigaction, int, sig,const struct sigaction __user *, act,struct sigaction __user *, oact,size_t, sigsetsize){struct k_sigaction new_sa, old_sa;int ret = -EINVAL;......if (act) {if (copy_from_user(&new_sa.sa, act, sizeof(new_sa.sa)))return -EFAULT;}ret = do_sigaction(sig, act ? &new_sa : NULL, oact ? &old_sa : NULL);if (!ret && oact) {if (copy_to_user(oact, &old_sa.sa, sizeof(old_sa.sa)))return -EFAULT;}out:return ret;}
在rt_sigaction里面,我们将用户态的struct sigaction结构,拷贝为内核态的k_sigaction,然后调用do_sigaction。do_sigaction也很简单,还记得进程内核的数据结构里,struct task_struct里面有一个成员sighand,里面有一个action。这是一个数组,下标是信号,内容就是信号处理函数,do_sigaction就是设置sighand里的信号处理函数。
int do_sigaction(int sig, struct k_sigaction *act, struct k_sigaction *oact){struct task_struct *p = current, *t;struct k_sigaction *k;sigset_t mask;......k = &p->sighand->action[sig-1];spin_lock_irq(&p->sighand->siglock);if (oact)*oact = *k;if (act) {sigdelsetmask(&act->sa.sa_mask,sigmask(SIGKILL) | sigmask(SIGSTOP));*k = *act;......}spin_unlock_irq(&p->sighand->siglock);return 0;}
至此,信号处理函数的注册已经完成了。
总结时刻
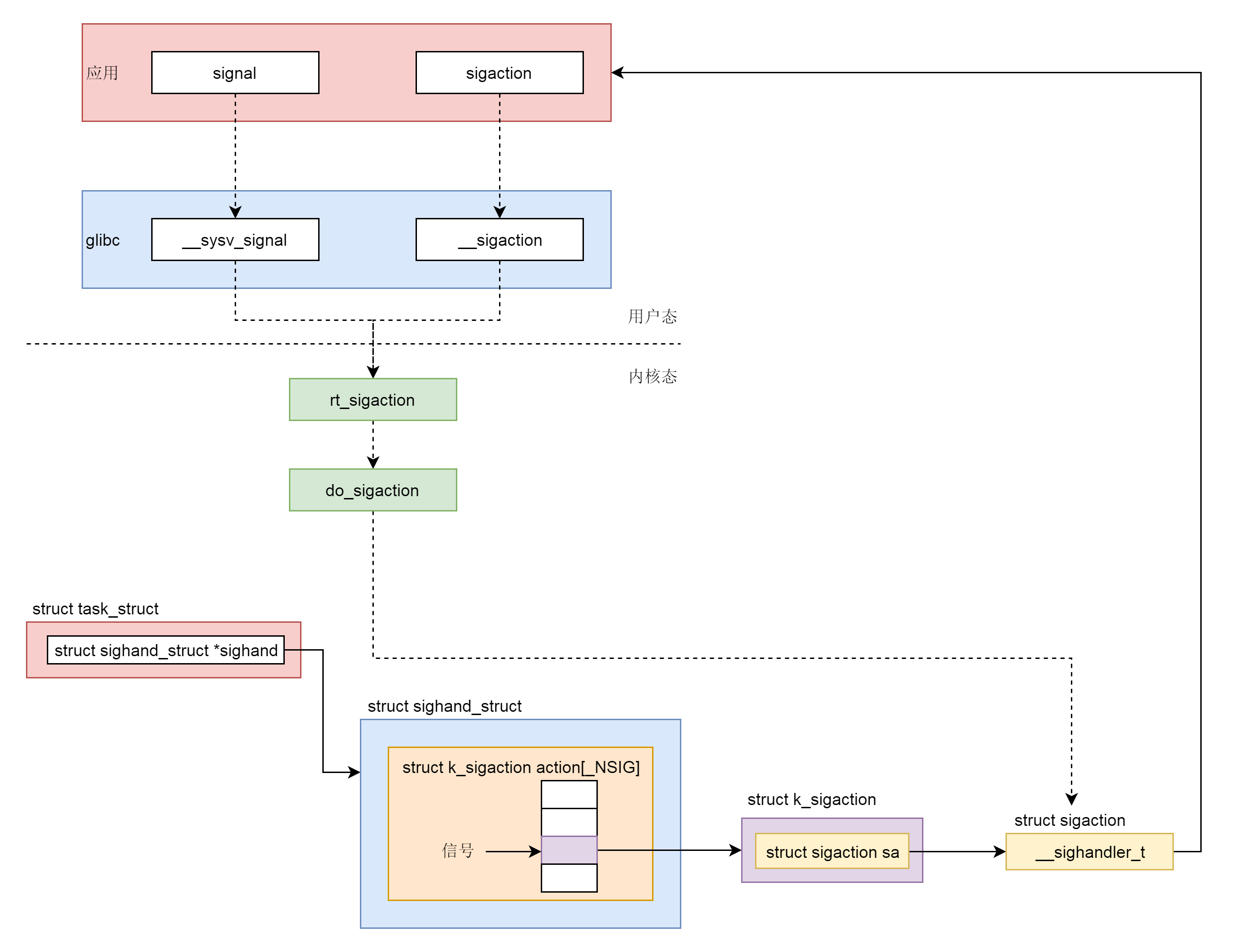
这一节讲了如何通过API注册一个信号处理函数,整个过程如下图所示。
- 在用户程序里面,有两个函数可以调用,一个是signal,一个是sigaction,推荐使用sigaction。
- 用户程序调用的是Glibc里面的函数,signal调用的是__sysv_signal,里面默认设置了一些参数,使得signal的功能受到了限制,sigaction调用的是__sigaction,参数用户可以任意设定。
- 无论是__sysv_signal还是__sigaction,调用的都是统一的一个系统调用rt_sigaction。
- 在内核中,rt_sigaction调用的是do_sigaction设置信号处理函数。在每一个进程的task_struct里面,都有一个sighand指向struct sighand_struct,里面是一个数组,下标是信号,里面的内容是信号处理函数。
课堂练习
你可以试着写一个程序,调用sigaction为某个信号设置一个信号处理函数,在信号处理函数中,如果收到信号则打印一些字符串,然后用命令kill发送信号,看是否字符串被正常输出。
欢迎留言和我分享你的疑惑和见解 ,也欢迎可以收藏本节内容,反复研读。你也可以把今天的内容分享给你的朋友,和他一起学习和进步。